Australia's Robotic and Autonomous Systems Strategy V2.0[1] aims to integrate robotic and autonomous systems into Army operations. Remote Autonomous Systems (RAS) represents a type of autonomous system that can carry out operations in remote environments, where sending humans is hard or dangerous. Considering Australia’s geolocation, the Army seeks a strategic edge in coastal, littoral, estuarine, and riverine (CLEAR) environments.[2] Using unmanned aerial vehicles (UAVs - a type of RAS), the Army can enhance operational efficiency in intelligence, surveillance, and reconnaissance (ISR) missions. Integrating RAS within directed energy weapons (DEWs), such as laser weapons that generate a high energy concentration to incapacitate targets, can improve their targeting accuracy. Using UAVs for area search and mapping enables them to conduct more efficient and less invasive search operations. In sum, deploying RAS for critical operations in CLEAR environments can reduce human risk, enhance operational capability of forces, and provide indirect force protection by acting as a barrier between the human forces and enemy threats.
Australia, the US, China, and the UK are experiencing several barriers that hinder efforts to incorporate autonomous systems within their militaries. While Australia has fewer resource and technological barriers than some other nations, it has yet to fully overcome challenges to effectively deploy RAS. Overcoming these challenges will require technology improvements in artificial intelligence (AI), networking, processing, and hardware (e.g., sensors and actuators). [3] [4] [5] [6]
Situational Awareness in Remote Autonomous Systems
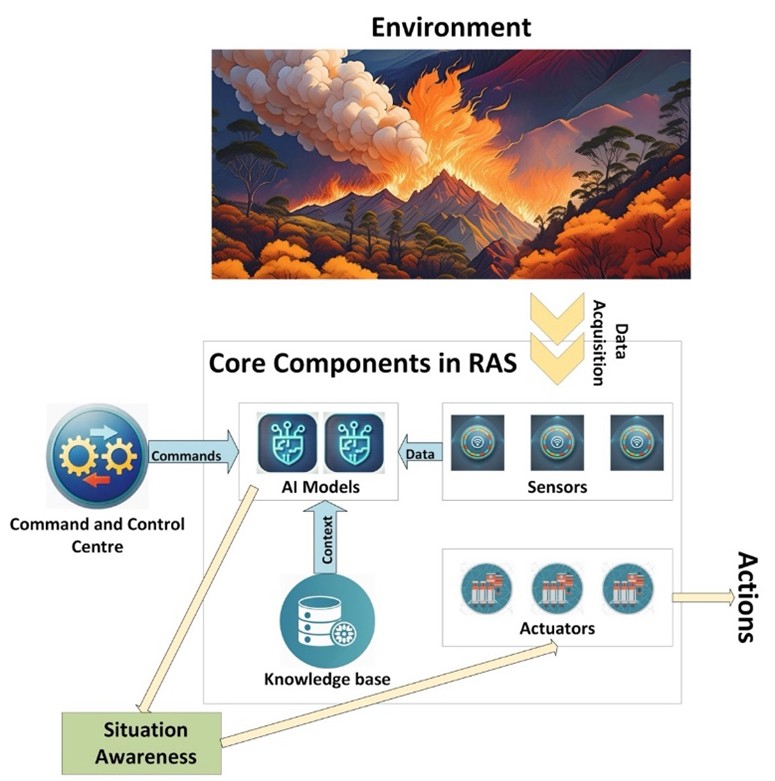
Situational awareness in RAS refers to the capacity of such systems to perceive and understand environmental elements and to predict how those elements might change[7]. RAS achieve situational awareness[8] by processing data and interacting with the command and control centre which typically exists at a remote location. The command and control centre issues commands based on mission goals, guiding the RAS's actions (e.g., guiding it to conduct surveillance for emerging bush fires at a certain location). The RAS relays real-time environmental data to the command and control centre (e.g., thermal imaging cameras that detect the temperature at the area). To achieve this, it uses onboard capabilities, such as onboard knowledge bases that stores essential information such as ontologies[9] (an ontology is knowledge that establishes relationships between the environmental data). The system also relies on learned experiences that, in turn, supports informed decision making. Further, the system is informed by AI models that analyse data (from sensors and the knowledge base) to make predictions and detections (e.g., locating a potential bushfire at certain location). Actuators execute the commands given by the AI models, interacting with the environment to carry out tasks.
Figure 1 depicts how RAS technologies and components interact to achieve to situational awareness during an example bushfire assistance mission.
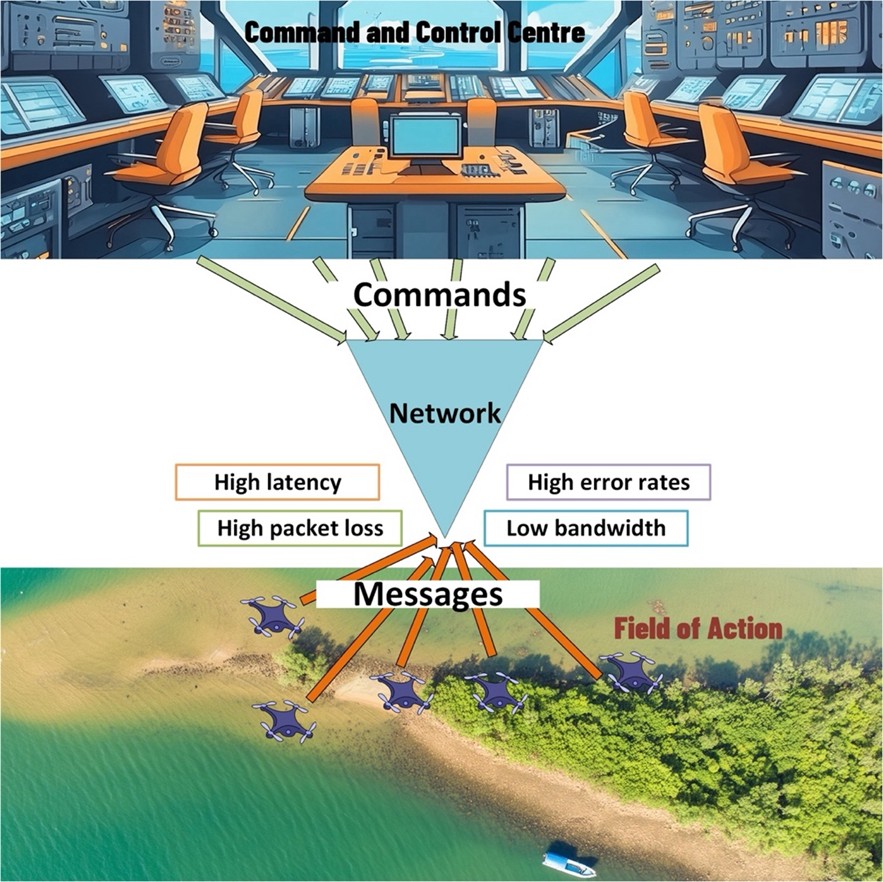
There are several factors that can hinder the situational awareness achievable by RAS. Environmental factors can cause the loss, degradation, or interference to network communications between operators and RAS, and among RAS themselves (e.g., factors such as distance, terrain, forest canopy, or weather). Communications may also be deliberately disrupted by adversaries. Situational awareness can be also affected by processing resources on-board RAS and its ability to discover potential data sources.
Another relevant consideration is operational load, which refers to the actions RAS need to perform to achieve strategic goals. When operational loads on RAS increase, processing speeds and network performance slow down. This problem is more common in RAS than in non-remote systems that have stronger network connectivity and can therefore be scaled using cloud services if necessary.[10][11] Further, the adaptability of RAS to changing operational environments is constrained by limited onboard processing capability and the systems’ ability to discover new data sources. Figure 2 depicts some of the key technical constraints imposed on RAS. Figure 2 depicts some of the key technical constraints imposed on RAS.
Challenges Caused by Limited Situational Awareness
If RAS are unable to maintain adequate situational awareness, their utility for military operations is considerably reduced due to following limitations:
Decision-making delay: RAS depend on their controllers’ commands, data from peer RAS and other sources, and onboard processing speeds for critical decisions. Unstable network connections, limited processing and data source discovery capabilities, and high operational loads can cause decision backlog.
Impact on real-time performance: RAS are equipped with machine learning (ML) algorithms that require robust network connections and adequate data and processing resources. Performance of ML algorithms degrade due to constraints in those resources, slowing down the system.
Failure to adapt: RAS operate in environments with unpredictable operational directions, environmental conditions, and adversarial actions. Limited situational awareness restricts the ability of RAS to respond to such dynamic factors.
Research Needed to Enhance Situation Awareness
To enhance the potential military utility of RAS, further research is needed to overcome the technological limitations that currently constrain these systems’ ability to achieve situational awareness. The following are some of the key issues that need to be addressed.
Create new intelligent resource discovery mechanisms: In order to function effectively, RAS must dynamically discover both data sources and processing resources. Currently, DARPA’s OFFSET offensive swarm-enabled tactics (OFFSET)[12] and collaborative operations in denied environment (CODE)[13] programs enable UAV swarms to share information with each other. NATO’s joint ISR initiative integrates coalition sensors data[14]. While necessary, these efforts focus more on data discovery than processing, and often rely on pre-existing sources, limiting scalability. Future research should prioritise models for discovering and allocating both data and processing resources. Outcomes should include the development of secure, open ecosystems with edge/cloud deployments, improved access to data sources, and the capacity to dynamically reassign resource configurations based on mission needs. Context management platforms like FIWARE[15] and CoaaS[16] can support such efforts.
Improve the accuracy of situational awareness: Alignment RAS’ situational awareness with real-world conditions depends on the quality of the underlying data – form which the situational awareness is created. The systems like blue force tracker (BTF)[17] and Elbit system’s[18] Torch-X[19] provide commanders with real-time information from sensors and GPS units mounted on soldiers in the field. The effectiveness of these systems, diminishes when data sources are degraded or compromised by, for example, cyber-attacks. So, quality-aware data acquisition models[20] should be incorporated into in RAS. These models support selection of data sources based on data quality metrics to achieve accurate situational awareness.
Leverage modern communication technologies: Communication technologies (such as LAN, 5G, and satellite channels (such as Starlink[21]) act as data carriers in RAS. These technologies differ in types, scales, and performance trade-offs. Diverse communication technologies are being adopted in the military scenarios. Starlink’s satellite constellation provides wartime communications in Ukraine[22]. DAPRA’s CODE program[23] uses UAV based relays to communicate between controllers and RAS. Ensuring data quality during transit requires solutions that dynamically select the most suitable communication channels based on mission needs. Future research should therefore focus on enabling network awareness, where technologies are dynamically selected by mapping their trade-offs to mission parameters.
Enhance intelligent processing capabilities: Real-time situation awareness in RAS depends on the systems’ ability to process incoming data at various scales. However, resource constrained RAS platforms, like small drones, possess limited onboard power and processing capacity. Lightweight and high-performance GPUs like NVDIA’s Jetson series are used in drones deployed in defence scenarios[24]. But their fight time is significantly impacted by the high power consumption and heat released by these GPUs. Offloading processing to edge or cloud platforms, such as HPE Edgeline[25] reduces the onboard processing load, but these solutions introduce latency and communication dependencies. To address these deficiencies, research is needed to develop dynamic processing allocation models that consider mission parameters (e.g., flight duration, network availability, processing demands) and distribute data loads to maintain optimal situation awareness.
Enhance interoperability: For scaling situational awareness, RAS need to process data from diverse and newly discovered sources, and they need to work with various network and processing resources. Creating such adaptability requires research into interoperability. NATO’s Federated Mission Networking supports[26]. Enabling interoperability raises privacy, security, and data transformation challenges. Open frameworks may expose systems to unauthorised access, and data discovered on the fly (e.g., from civilian traffic or crowd services) may not match RAS-configured formats. Further research should support the development of secure, standardised frameworks that enable integration of heterogeneous data sources while preserving system integrity.

In Occasional Paper 40 Current and Future Challenges in Augmenting Situational Awareness for Remote Autonomous Systems, the authors examine the role of autonomous systems in active conflicts and provide a thorough analysis of their technical limitations. Drawing on these identified gaps, the paper offers detailed reflections on the next steps for the Austrian Army to overcome these challenges and effectively integrate RAS into military operations.
Endnotes
[1] “Robotic & Autonomous Systems Strategy v2.0.”
[2] McMillan, “Army Capability Issues: As CLEAR as Daylight.”
3Wyatt et al., “Understanding How to Scale and Accelerate the Adoption of Robotic and Autonomous Systems into Deployable Capability.”
[3] Chin et al., “TAK-ML: Applying Machine Learning at the Tactical Edge.”
[4] Endsley, “Toward a Theory of Situation Awareness in Dynamic Systems.”
[5] Raji et al., “Advanced Mission Management System for Unmanned Aerial Vehicles.”
[6] Zhao et al., “An Intelligent Multi-Sensor Cooperative Perception Framework for Situational Awareness Enhancement.”
[7] Endsley, “Toward a Theory of Situation Awareness in Dynamic Systems.”
[8] Endsley, “Toward a Theory of Situation Awareness in Dynamic Systems.”
[9] Perera et al., “Context Aware Computing for the Internet of Things: A Survey.”
[10] “AWS Auto Scaling.”
[11] Lee et al., “Extending Sensor Networks into the Cloud Using Amazon Web Services.”
[12] “OFFSET: Offensive Swarm-Enabled Tactics.”
[13] “CODE: Collaborative Operations in Denied Environment.”
[14] Murray, “How NATO Makes the Unknown Known.”
[15] “FIWARE.”
[16] Hassani et al., “Context-as-a-Service Platform: Exchange and Share Context in an IoT Ecosystem.”
[17] Lafontaine, “Army Set to Modernize Blue Force Tracking Network.”
[18] Elbit Systems, “ADVANCING ON ALL FRONTS.”
[19] Elbit Systmes, “Torch-XTM Mounted.”
[20] Jagarlamudi et al., “Quality and Cost Aware Service Selection in IoT-Context Management Platforms.”
[21] “Starlink.”
[22] Moskalenko, Mak, and Semenovych, “Can Ukrainian Soldiers Survive without Musk’s Starlink?”
[23] Wilson, “Autonomous Technology Cometh.”
[24] Keller, “Rugged Computers Struggle with Environmental Requirements.”
[25] “HPE Edgeline.”
[26] Pullen et al., “Modelling and Simulation in NATO Federated Mission Networking.”