Introduction
Authors: Kanaka Sai Jagarlamudi, Kevin Lee, Arkady Zaslavsky and Shaine Christmas
The Australian Army’s robotics and automation strategy provides that the Army will adopt robotic and autonomous systems to maintain a competitive advantage in war.[1] The strategy proposes to enhance (refine existing capabilities), augment (add new functionalities) and replace (introduce entirely new platforms and capabilities) existing technologies with robotic and autonomous systems. This outcome is to be achieved through a process of collaboration with industry, academia and international partners.
Remote autonomous systems (RAS) are designed to operate independently of their controllers in remote, hazardous or inaccessible environments. They are able to execute complex missions with minimal human control. RAS have the potential to reduce the physical and cognitive demands on Australian soldiers. For example, autonomous systems such as unmanned aerial vehicles (UAVs) can carry heavy equipment, monitor soldiers’ health and performance, and provide real-time surveillance capabilities. RAS offer Army the opportunity to scale operations by increasing firepower, protecting the force and providing operational reach. Accordingly, RAS have the potential to both boost the effectiveness of individual soldiers and strengthen the overall capabilities of the military force.
The United States and China are using advanced technologies to enhance their autonomous systems and achieve a strategic edge in the Indo-Pacific region. By integrating RAS into its military capabilities, the Australian Army can ensure it remains competitive, capable and ready to defend Australia’s national interests in a technologically advanced global landscape.
For RAS to operate effectively in support of military operations, these systems must have situational awareness. Situational awareness[2] refers to the systems’ ability to perceive, understand, predict and respond to elements within their environment[3] and is essential for enabling RAS to navigate and respond to dynamic environmental and mission conditions. Attaining situational awareness involves rapid acquisition and processing of diverse data attributes that relate to operational environments and missions. This data typically stems from advanced sensor integration, ground control or peer RAS. Network technologies carry the data, which is then processed by artificial intelligence (AI) and other technologies to create situational awareness.
Scalability of situational awareness refers to the ability of RAS to expand situational awareness without compromising mission functionalities. It is achieved by acquiring and processing larger volumes of data. Scalability is necessary to achieve better situational awareness and is therefore essential in efforts to optimise the use of RAS in modern warfare.
To date, only limited research and development has been conducted on the issue of RAS scalability. To address this gap, this article provides insights into how the Australian Defence Force (ADF), and the Australian Army in particular, can effectively incorporate RAS that have the critical attribute of scalable situational awareness. To achieve this, the article:
- reflects on existing data acquisition, network and processing enhancement solutions relevant to enhancing situational awareness in RAS
- analyses the reviewed solutions to identify their limitations in remote and challenging environments
- based on the limitations identified, and the technical characteristics of RAS, recommends effective approaches to augment situation awareness.
Use of Remote Autonomous Systems by Prominent Military Forces
Autonomous systems are used by several countries with advanced defence capabilities, as well as by other less technologically advanced nations that are currently engaged in conflict. Below are a few representative examples; a comprehensive list is beyond the scope of this article.
United States of America
The primary motivation for US efforts to acquire RAS is to achieve operational superiority. In this regard, the focus is on mitigating risks to soldiers, reducing their workload and enhancing the situational awareness of the force to support both offensive and defensive actions.[4] To this end, the US Army is progressing through a phased program of developing and integrating RAS. In the far term (2031–2040), the US aims to replace older autonomous systems with advanced RAS that will be fully integrated into military capabilities. This goal suggests that the US intends to achieve full-scale deployment of RAS within Army operations soon. Indeed, a military review published by the US Army[5] emphasises the immediate need for AI integration into military systems to enhance operational decision-making. The achievement of AI integration aims to create a more accurate and detailed common operational picture across various echelons, as well as enabling faster and more informed decision-making within multi-domain battle environments.
China
China’s motivation for deploying autonomous systems in military operations is rooted in its desire to surpass the US as a global superpower by 2049.[6] To achieve this, China has implemented a military–civil fusion policy that aims to integrate civilian technological advancements with military applications. This Chinese policy has driven significant investment in emerging and disruptive technologies, including AI and military robotics. Other notable developments include the production of cutting-edge UAVs like the GJ-11 and a significant increase in the acquisition market for military robotics.
Russia
Russia is motivated to deploy autonomous systems in military operations to counter its adversaries.[7] To this end, Russia has invested in the development and deployment of various autonomous platforms across aerial, ground and maritime domains. One of its most advanced autonomous systems is the S-70 Okhotnik unmanned combat aerial vehicle, which is designed for long-range strike missions with a range of up to 6,000 kilometres. Another notable system is the Orion UAV, which performs intelligence, surveillance and reconnaissance (ISR) and combat roles with a range of 250 kilometres. Despite such advances, most Russian autonomous systems still operate under significant human control, with aims to achieve greater autonomy in the future.
Ukraine
Ukraine uses a variety of autonomous systems in its ongoing conflict with Russia. It has deployed both military-grade drones (like the Turkish Bayraktar TB2) and commercially available off-the-shelf (COTS) drones.[8] The Bayraktar TB2, equipped with AI-driven targeting systems, has been successful in precision strikes. Ukraine has also adopted more cost-effective COTS drones for artillery spotting and direct attacks. One of the most notable developments is Ukraine’s use of swarm tactics where large numbers of COTS drones are deployed simultaneously to overwhelm enemy defences. These systems are not fully autonomous and still require significant human input.
From this analysis, it is evident that several nations are actively seeking to incorporate RAS into their military arsenals. Most systems still require significant human control.
Current Solutions for Scaling Situational Awareness
To better understand how to solve the issue of scalable situational awareness in RAS, it is useful to first consider the data sources, as well as the hardware and software components, that combine to make scalability possible.
Situational awareness is achieved through the interaction of various modules in RAS, such as data sources (e.g. onboard sensors, remote operators, cloud databases and peer RAS units), networks, data processing units, and actuation mechanisms. These components are not exclusive to RAS used in the military sector; RAS from civilian industry, including autonomous cabs,[9] space flights,[10] and robots used in supply chains,[11] possess similar attributes and operate on the same principles. As an element of situational awareness, data sources provide contextual information (or context)8 to RAS. Contextual information refers to data related to a place, person or object. In a military context, RAS use contextual information to infer relevant states of the target and to build situational awareness.
Context exchange between RAS and data sources occurs via networks. The inbuilt data sources in RAS use internal communication channels (data cables) to communicate with processing components. RAS also rely on external data sources, which require low-latency communication. Autonomous mobile robots exchange sensor data and task information with cloud processors and human operators. These robots use 5G networks or dedicated high‑bandwidth links such as gigabit multimedia serial link (GMSL), which supports up to 6 gigabits of sensor data and low bit‑error rates. Bandwidth describes the maximum rate per second at which data can be transmitted over a network, indicating how much data can pass through the network at any given moment. RAS process the acquired context from networks to infer environmental situations using AI and machine learning (ML) algorithms which run on various processors. These data inputs, and network and processing components, enable RAS to take necessary actions (actuation).
An example of non-military use of RAS is Waymo’s current-generation autonomous cabs. These cabs were introduced into service in Arizona’s metropolitan Phoenix area in 2017 and were being rolled out in greater Arizona, San Francisco and Los Angeles from 2024. Supported by RAS, Waymo cabs identify their surroundings using numerous lidars mounted to them. The cab’s ‘brain’ is an onboard computing system with central processing units and graphics processing units (GPUs) that process sensor data in real time to identify objects and plan safe driving paths. When these autonomous cabs encounter unusual situations that are beyond their inbuilt AI models’ capabilities, they relay those situations to remote human operators to assume control. The entire process occurs through ultra‑reliable low‑latency communication.[12] Another example of the commercial use of RAS is in factory settings where autonomous mobility robots keep human workers safe from hazardous machines and chemicals using lidar to navigate dynamic environments.
In the government sector, NASA’s Ingenuity Marks helicopter is supported by RAS technology. This helicopter has been designed to test if powered flight is possible on Mars. It uses a laser range finder and a navigation camera to realise altitude and velocity. It also relies on multi-processor architecture which supports the functioning of rotor blades based on the environmental conditions presented by the sensors.
While there are successful examples of RAS in the military, commercial, industry and government sectors, further improvements across context acquisition, networking and processing are necessary to achieve and maintain scalable situational awareness. RAS need the capacity to consistently acquire and process data generated in diverse contexts and from varying sources. However, deficiencies in contemporary technology mean that RAS are currently limited by the need to rely on fixed sources of context, so they are unable to achieve seamless context source discovery. Situational awareness is also compromised by limitations in networking and processing performance. The quality of service (QoS) of networks (usually represented by metrics such as bandwidth and delay[13]) and the QoS of processing (including metrics like reliability and interoperability) also significantly impact overall situational awareness.
A further problem is that few RAS can effectively process contextual information obtained from diverse sources. Instead, they are generally limited to a fixed set of sources, predefined at the time of their deployment. Efforts are being made, however, to overcome this limitation. For example, the Defense Advanced Research Projects Agency (DARPA) OFFensive[14] program envisions up to 250 UAVs and ground systems supporting defence missions in urban environments. These UAVs enable information-sharing, acting as context information sources for one another. Still, they cannot discover new sources, and data acquisition remains limited by the predefined data sources in their software stack.
There are several available methods to enhance situational awareness in RAS. However, limitations still exist. The following section provides further explanation.
Context Management Platforms
Context management platforms (CMPs)[15] [16] offer the potential to enhance the data acquisition capabilities of RAS. CMPs facilitate context acquisition from diverse sources by bridging applications and sources. As outlined below, CMPs can be categorised into three types: domain specific, open ecosystem centralised, and open ecosystem distributed.
Domain-Specific CMPs
The primary characteristics of domain-specific CMPs are that they incorporate a fixed set of contextual information sources and that they are bound to specific domains. BDCAM[17] and CoCaMAAL[18] are two examples related to assisted living and patient monitoring; these systems data-share between related sensors and applications. These types of CMPs are useful for applications with certain contextual information needs but they are incompatible with RAS, which require context from far more diverse and dynamic sources.
Open Ecosystem Centralised CMPs
These types of CMPs coordinate and deliver relevant contextual information to applications based on updates received from various sources. Accordingly, they enable applications to acquire diverse contextual information by acting as a central server. Examples are context-as-a-service (CoaaS)[19] and FIWARE CMPs.[20] The main limitation is that the centralised nature of these types of CMPs can slow down their response times when there is limited network connectivity or if one platform is attempting to serve multiple RAS. As the load from context sources and applications increases, the CMPs’ processing times may also rise. Except for the CoaaS CMP, most advanced CMPs of this type also lack the functionality to deliver contextual information with quality of context (QoC) metrics such as timeliness and accuracy. This article discusses the attributes of QoC in more depth in a later section.
Open Ecosystem Distributed CMPs
This type of CMP is currently under development in the form of a distributed version of CoaaS CMP.[21] In these ecosystems, the context sources and applications are interconnected with a distributed network of CMPs. Distributed CMPs have the potential to provide faster context responses compared to centralised CMPs. They therefore allow for far faster access to contextual information than can be achieved by either domain-specific CMPs or open ecosystem centralised CMPs.
While open ecosystem distributed CMPs represent a promising technological development, they still have characteristics of centralisation. This can lead to inconsistencies in QoC compliance when operating under unstable network conditions. Moreover, as the number of context sources and applications increases, ensuring synchronisation across distributed nodes becomes complex.
Enhancing Networks (Communication)
There are several methods available to enhance networks that may help to improve the situational awareness achievable by RAS. These include scheduling algorithms, heterogeneous network switching, relay nodes and ML. These methods span a range of military use cases, such as improving communication between military vehicles, providing navigation support for UAVs in GPS-denied environments, and enabling surveillance for search and rescue operations. Other use cases include autonomous decision-making and enhanced long-distance data transmission. The methods are outlined in further detail below.
Scheduling Algorithms[22] [23] [24]
Scheduling algorithms can be used to prioritise data in transmission to ensure efficient and timely delivery in bandwidth-constrained environments. The main limitation of this method is that it cannot be used effectively in environments with varying bandwidths. Instead, scheduling algorithms are generally designed for specific bandwidth conditions and may not be flexible enough to adjust to fluctuations in bandwidths. Combining these scheduling techniques with relay node based approaches (discussed below) could address this limitation.
Heterogeneous Network Switching[25] [26]
This method is used to seamlessly switch between different network technologies (e.g. wi-fi, 5G, satellite), based on the availability and performance of the network, to maintain optimal connectivity. Many commercial drones, such as the DJI Matrice 300, use this technology. It switches between different communication channels such as long-term evolution (LTE), wi-fi, or private radiofrequency links, ensuring that connectivity is maintained even in remote areas or challenging environments. The difficulty here lies in the varying speeds and performance of these different networks. Wi-fi and 5G typically provide faster speeds but have limited ranges, while satellite internet offers long-range connectivity at slower speeds. The slower speed of satellite networks can hinder RAS performance in dynamic environments. Equally, the remoteness of RAS operations often makes wi-fi or cellular networks inaccessible.
Relay Nodes[27] [28]
These are intermediate nodes (also known as hopper nodes) used to extend network coverage or boost signal strength. In real-word deployments of RAS, using relay or hopper nodes is common for extending network connectivity. For example, the Parrot ANAFI[29] drone uses relay nodes (4G network nodes) for long-range communication. Military drones often employ mesh networks with intermediary nodes to maintain communication in remote areas.
Static nodes, such as those used in typical GSM networks, are the most common types of relay nodes. The problem is that static nodes may be ineffectual for maintaining the connectivity of RAS. This is because static nodes cannot reposition to accommodate environmental factors that can disrupt signal strength and reliability, such as high terrain or tides. Mobile relay nodes, such as network-carrying drones or vehicles, can be used to overcome these challenges. This method allows the nodes to adjust dynamically to the changing environments, but it introduces unpredictability in terms of costs and resource requirements.
Machine Learning for Data Prediction [30]
ML uses AI-based techniques to predict and reconstruct missing or corrupted data. The accuracy of ML predictions, however, is heavily dependent on the quality of the input data. If the data is incomplete or ‘noisy’, the predictions become less reliable. While ML can help predict missing data in continuous data streams, this method will inevitably struggle to accommodate new or unrelated inputs, limiting its utility in RAS.
Enhanced Processing
Processing high volumes of real-time data requires significant computational power. Military-grade drones like the MQ-9 Reaper[31] are equipped with powerful onboard computing systems such as field programmable gate arrays (FPGAs) and system-on-chip architectures. These systems enable faster data processing and offer energy efficiency to handle complex tasks.
RAS with scalable mission objectives often face varying data rates and mission demands. When RAS are engaged in missions with constant and predictable data volumes, onboard computing resources are generally adequate for data processing. However, if RAS are responding to fluctuating data loads, more flexible processing capabilities are needed than are generally built in. There are several available ways to improve the data processing capacity of RAS. These methods are outlined below.
Edge and Fog Computing for Distributed Data Processing
Edge computing refers to the idea of bringing computation closer to devices that need it in order to minimise latency. Fog computing is more specifically a layer between the edge and the cloud to provide additional computing resources to the edge. In this method, additional processing components are deployed closer to RAS. This reduces the load on the inbuilt processing resources of RAS and the latencies associated with carrying data to ground stations.
An example of a system that uses edge and fog computing is the US Army’s Advanced Battle Management System.[32] It distributes command and control to multiple resources instead of relying on a central system. Another example is the US military’s F-35 fighter jet, which uses edge computing principles to process vast amounts of data directly on the aircraft. In this way, sensor data is collected and fused with information from other F-35s in the same squadron, and a unified picture of the battlefield is generated.[33]
While processing data on edge devices is beneficial for real-time responses, limited computational capabilities may mean that it is unable to handle all of the incoming data from diverse sources. For example, problems can arise when the processing power of edge devices does not match the capabilities of central servers or cloud-based systems. As a result, data synchronisation issues can occur.
Data Offloading to Ground Stations or Cloud Systems
When the edge nodes, fog nodes (if deployed) and onboard capabilities in RAS reach their processing limits, data is transmitted (offloaded) to ground stations or cloud resources for processing. For example, the US Army has multiple legacy and state-of-the-art applications where data is offloaded to ground stations.
An example of a ground station is the Air Force Distributed Common Ground System.[34] It has the capacity to gather and process data gathered by various ISR platforms. Similarly, the Tactical Intelligence Targeting Access Node (TITAN)[35] system processes data collected by multiple sensors, including space, aerial and ground-based platforms.
While offloading can free up local resources, it also introduces dependencies on communication links. If those links have limited availability or are jammed by adversaries, the offloaded service may become unavailable. Latency issues and network dropouts are also significant challenges when processing is reliant on ground stations or cloud systems. In remote or contested areas, communication channels may not be fast enough to support continuous data transmission to these systems. As a result, there may be delays in data transfer.
Data Balancing Across Multiple RAS
Data balancing involves distribution of data with peer RAS, nodes and multiple servers for processing so that no single component is overwhelmed. When multiple RAS work collaboratively,[36] processing resources can be shared between collaborating RAS. When the computational load is spread across a drone swarm, the entire swarm can dynamically balance tasks and resources to achieve mission objectives. For example, under the US Army’s Project Convergence, drone swarms work together to engage targets.[37] The US Army Research Laboratory has also been working on enhancing swarm capabilities.[38] While swarm capabilities offer an advantage over less coordinated RAS, their limited individual processing capacity and environmental constraints (such as distance) make sharing resources inefficient.
Data Compression or Prioritisation Techniques
These techniques involve compressing data at the source and sending it to RAS processing units. When received by the RAS, the data is prioritised for processing based on mission conditions. These techniques considerably lower processing demands at the receiving end. For example, military UAVs, such as RQ-4 Global Hawk,[39] compress large datasets collected by onboard sensors and then transmit only the essential information back to mission command and control.[40]
The main limitation with this method is that the time and resources required for data compression are directly proportionate to the volume of data collected. Data prioritisation relies on predefined rules or AI-based systems to rank the importance of incoming data. This method may therefore falter if a system is unable to establish data priority. This might occur when all data possess similar significance or when data compression is performed (e.g. when the data is end-to-end encrypted). Also, because data volumes can vary significantly depending on mission conditions, important data may be overlooked when the data volume is high, compromising situational awareness.
AI and ML for Adaptive Data Processing
This process involves using AI and ML algorithms to automatically process relevant data. Platforms that use this technology autonomously detect and classify targets without the need to transmit large volumes of raw data back to a ground station. An example of a military application is FIRESTORM AI, which is part of US Army’s Project Convergence.[41] This system analyses sensor data from UAVs and recommends the best weapons systems to engage identified targets. Another AI-driven platform is Maven Smart System,[42] which uses ML algorithms to process full-motion videos in UAVs.
To effectively process the data generated by AI and ML algorithms, reliable communication links are necessary between the UAV and the ground station. This is a major constraint, as communication networks in remote or contested environments can be unstable. Also, most RAS lack sufficient onboard processing power to process large datasets; they must instead rely on external systems, a situation which again reinforces the need for reliable communication links.
Further, if the data received by the UAV is not part of the AI system’s training dataset, the system may not be able to respond effectively. One concern is that if the AI encounters novel data patterns or scenarios that were not used in training, the system might misclassify their importance. When faced with novel data patterns, AI- and ML-based adaptive data processing systems may struggle to prioritise tasks effectively, which can degrade performance and increase adaptation time.
Using Scalable Hardware Architectures
Processing hardware architectures like FPGAs and GPUs are designed to accommodate surges in processing demands. RQ-4 Global Hawk[43] uses FPGAs to enhance processing abilities, allowing faster data conditioning and more efficient transmission of data.
The issue with both FPGAs and GPUs is that they consume a significant amount of power, limiting their utility in RAS with limited power supplies. They also generate substantial heat, requiring effective cooling systems. Integrating additional cooling mechanisms within lightweight RAS is impractical due to size, weight and design constraints. Further, if networks cannot transfer data quickly enough to match the processing speeds of the hardware, the performance gains can be diminished.
Caching and Data Preprocessing
Caching and data preprocessing methods are employed to temporarily store data, making it accessible when onboard processing resources are constrained. The US Army is using this method in efforts to implement full-motion video capabilities in the MQ-1C Gray Eagle UAV, including caching critical video data on board. This capability will enable the platform to access previously captured information during surveillance operations.
Data caching has limitations in dynamic and unpredictable combat environments. Specifically, relying on data caching and preprocessing will be less effective in evolving mission scenarios or missions requiring data processing from multiple sources: as new variables and threats emerge, cached data may rapidly become irrelevant.
Recommendations for Enhancing the Situation Awareness in Remote Autonomous Systems
The preceding analysis has demonstrated that situational awareness in RAS depends on the performance and coordination of data acquisition, network and processing components. It has also shown that existing methods to scale these components have their limitations when applied to RAS.
This section contends that RAS need to incorporate CMPs or similar technologies that allow for the acquisition of diverse contextual information within compliant QoC standards. It argues that QoS metrics (related to processing and network performance) are key requirements for scalable RAS. This section conceptualises how to incorporate CMPs with RAS. It also explores how network and processing solutions can be integrated into RAS, including recommendations based on whether the solution is compatible with QoS metrics.
Incorporation of CMPs with RAS for the Effective Acquisition of Contextual Information
Most CMPs share common functionalities.[44] Potential therefore exists to generate a standardised conceptual method for integrating RAS with CMPs. QoC metrics represent how usable contextual information is for RAS across identified mission conditions. Table 1 presents the different QoC metrics and their definitions.[45] For the purposes of the table, the term ‘contextual information attribute’ refers to a piece of information (e.g. temperature).[46]
| QoC metric | Definition |
|---|---|
| Timeliness | The level of validity of a contextual information attribute based on time |
| Accuracy | The level of alignment of a contextual information attribute compared to the ground truth |
| Resolution | The level of detail in a contextual information attribute |
| Completeness | The extent of availability of relevant metadata in a contextual information attribute (this metadata is required for computing QoC metrics) |
| Significance | The level of a contextual information attribute’s importance to the application |
| Representation consistency | The level of data format compliance of a contextual information attribute and its metadata |
| Sensitiveness | The degree to which access to a contextual information attribute and its metadata is preserved |
Not all CMPs can acquire QoC-compliant context. Most of them locate data sources that produce the required context without ensuring QoC compliance. Some CMPs, such as CoaaS[47], are equipped with advanced components like the context cost and quality engine (ConCQeng).[48] These components ensure RAS acquires QoC-compliant context.
CMPs typically connect with applications, such as RAS, and contextual information sources through application programming interfaces (APIs). QoC managers, such as ConCQeng, can either connect to CMPs via APIs or be incorporated internally. Figure 1 illustrates the process flow of RAS integration with a CMP that is capable of delivering QoC-compliant contextual information (or context).
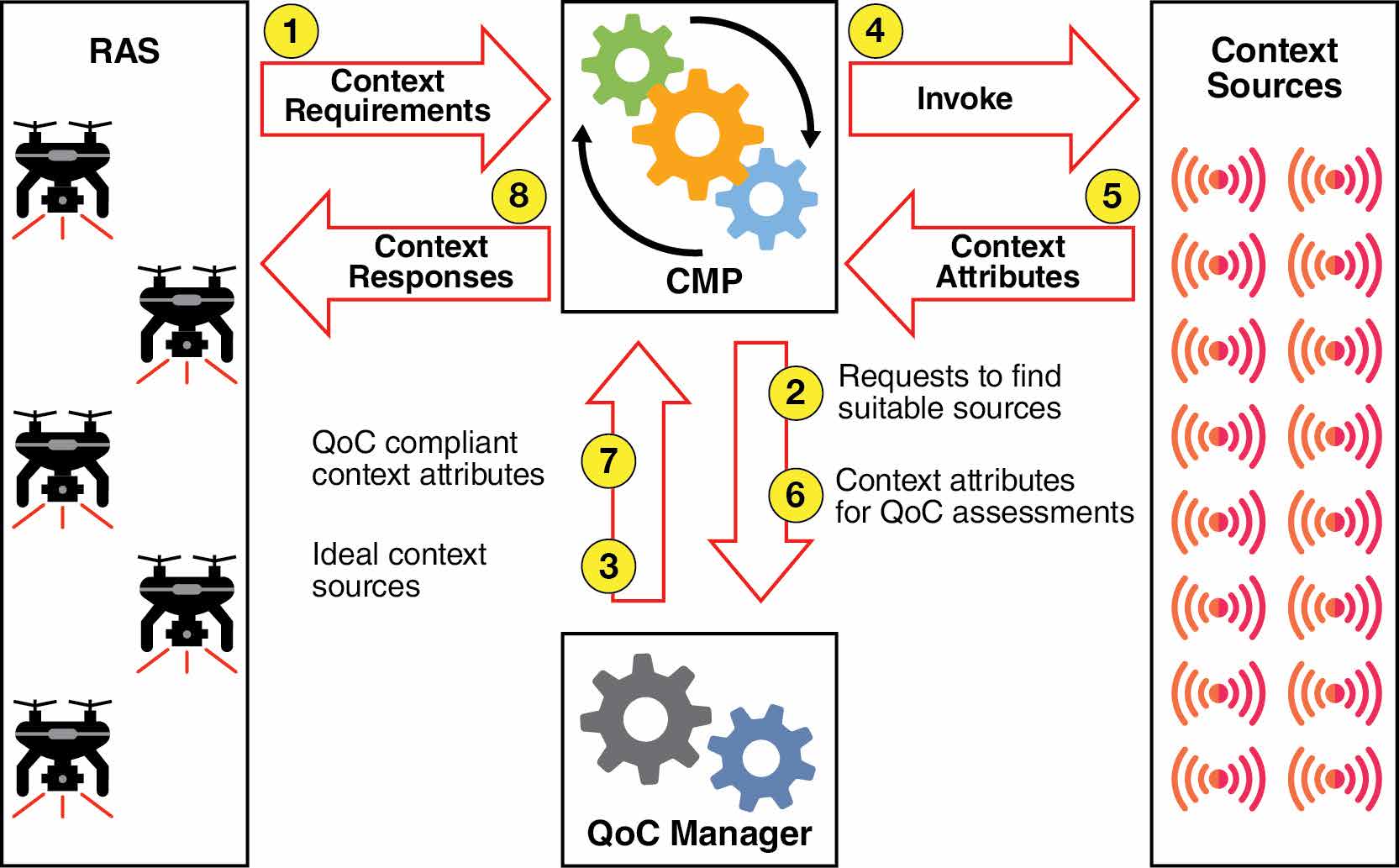
The following steps explain the process illustrated in Figure 1.
- Step 1: RAS initiate queries for contextual information (each query contains the required context attributes and respective QoC requirements). Queries are typically expressed in languages like SPARQL or those specific to context managers, such as the context definition query language (CDQL).[49]
- Step 2: Upon receiving a query, the CMP requests the QoC manager to identify context sources capable of meeting the query’s requirements.
- Step 3: The QoC manager identifies and sends back the information of the most suitable sources. This is possible as the QoC manager evaluates the QoC delivery rate of context sources over time by validating their context attributes.[50]
- Step 4: The CMP invokes the identified context sources.
- Step 5: The context sources deliver the requested attributes to the CMP.
- Step 6: The QoC manager validates the received context attributes for QoC compliance, and updates the QoC delivery rate of the context sources.
- Step 7: The QoC manager forwards the valid context attributes to the CMP.[51]
- Step 8: The CMP delivers the validated context attributes to the RAS.
The process described in Figure 1 enables RAS to be incorporated with a CMP that is integrated with a QoC manager. This relationship ensures that RAS acquire QoC-compliant context attributes and can achieve diverse contextual acquisition to enhance situational awareness.
Figure 1 specifically pertains to a centralised CMP ecosystem. In a distributed CMP ecosystem, the local functionalities of each CMP, its associated RAS and its context sources remain the same. The key difference is the cross-exchange of contextual information between CMPs when required, where each CMP acts as a context source for the others.
Mapping Network Quality of Service Metrics to Relevant Methods for Scalable Situational Awareness
Figure 2 maps QoS metrics to the network enhancement methods that potentially attain them (indicated in green boxes), those that conditionally attain them (indicated in orange boxes) and those that may not attain them (indicated in red boxes). This mapping is based on the definitions of QoS metrics and the functionality of the enhancement methods to align with these definitions. The use of these methods, as well as their influence on the given metrics, can be seen in many defence-related applications.
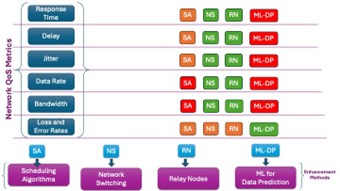
The following QoS metrics are related to networks[52] and play a crucial role in determining network performance.
- Response timerefers to the turnaround time—the time taken for a message to leave the source, reach the destination and receive a response back.
- Delay(also called latency) indicates the total time it takes for a data packet to travel from the source to the destination.
- Jitterrefers to the variance in delay—how much the data packet delivery times vary between transmissions.
The metrics described above can be attained through network technology switching, such as by moving from cellular networks to satellite networks, to maintain connectivity. For example, Honeywell’s JetWaveX[53] offers satellite communication systems for military use that enable network technology switching to ensure that a reliable communications path is always available. This avoids spikes in delay and jitter, which in turn improves the capacity of RAS to respond quickly to dynamic data inputs. Despite this benefit, network technology switching cannot improve the underlying network connection or increase the network’s capacity.
Another method for sustaining these metrics is by the use of relay nodes. Relay nodes enhance both connectivity and speed by distributing network traffic over multiple paths. For example, the Battlefield Airborne Communications Node[54] is a US Air Force-led program designed to improve communications and data-sharing across different military forces and platforms in network-constrained environments. Here, a high-altitude aircraft carries communication payloads, acting as a relay node. This approach helps overcome the difficulties caused by mountains or distance, reducing the jitter that may be caused by dynamic operational conditions.
Scheduling algorithms also contribute to preserving the metrics described in Figure 2. They do this by prioritising smaller or high-priority messages based on network capacity. These algorithms ensure that critical data is transmitted efficiently, optimising the use of available resources. However, scheduling algorithms only optimise existing data flows within the constraints of network capacity; they cannot enhance the network’s overall ability to accommodate or carry larger volumes of data.
According to an article published in the US Army’s Cyber Defense Review,[55] QoS can be preserved in network-constrained environments by graceful degradation. That is, when resources are insufficient to meet the demands, the system adaptively degrades service (or scheduled services) in a controlled and prioritised way to maintain an optimal QoS. However, the overall capacity of the network still depends on the capacity of the network’s links. So the QoS requirement may not be met if the network capacity is inadequate.
As discussed in the previous section, ML techniques predict and reconstruct missing or corrupted data once it reaches its destination. So ML can be useful in efforts to manage loss and error rates. Such rates often represent missing or corrupted data, which can affect the integrity of the entire dataset. However, ML cannot improve the underlying network connection or increase the network’s capacity. Further, if the network suffers from high jitter or latency, ML-based recovery cannot compensate for the disruptions caused by poor network performance. Therefore, ML-based methods are not well suited to maintaining data rate and bandwidth.
Loss and error rates can be conditionally preserved through scheduling algorithms, network switching and relay nodes. Loss rate is the percentage of data packets sent but never received at the destination. Error rate is the frequency of corrupted or altered packets during a transmission. Scheduling algorithms help by optimally aligning the transmission of messages with available resources. Network switching contributes by selecting the strongest available technology to reduce data loss and transmission errors. Further, relay nodes reduce loss and error rates by diverting data through the most suitable channels. However, these methods are not always foolproof. Relay node malfunctions—or failures in the available networks—can increase the loss and errors rates in relay node and network switching methods. If the data must be transmitted in a specific sequence, scheduling methods may not work.
Note: The perspective presented on the usability of relay nodes and network switching assumes the availability of relay nodes and alternative network technologies to handle varying data loads.
Mapping Processing QoS Metrics to Relevant Methods for Scalable Situational Awareness
Table 2 lists and defines the QoS metrics related to processing and contains both general metrics (applicable to all technological systems) and metrics exclusive to context- and situation-aware systems[56] (such as RAS).
| QoS metric | Definition |
|---|---|
| Availability | The degree of the processing resource’s accessibility within a given timeframe |
| Reliability | The processing resource’s ability to perform its functions without failure over a specific period |
| Scalability | The processing resource’s ability to handle increasing workloads without performance degradation |
| Interoperability | The processing resource’s ability to seamlessly exchange information with other systems or processes |
| Security and privacy | The level of access protection, confidentiality and integrity of data |
| Service adaptation time (exclusive to context- and situation-aware systems) | The time taken by a system to adjust or switch between services based on changing conditions |
| QoC (exclusive to context- and situation-aware systems) | The aggregate of quality metrics associated with contextual information |
The performance of processing modules is generally judged based on considerations of availability, reliability, scalability, interoperability and security and privacy. Additional metrics like service adaptation time and QoC are also relevant in situationally aware systems like RAS. This is because RAS are time-sensitive applications that are heavily reliant on contextual information. Therefore, maintaining high-quality contextual data and faster service times is essential for enhancing their performance.
As Figure 3 depicts, determining whether an application has achieved the QoS metrics (availability; reliability; scalability; interoperability; security and privacy) and QoC is a subjective assessment. Unlike network QoS metrics (where metrics can be predicted based on the methods’ functionalities and metric definitions), maintaining processing metrics depends on several factors. These include hardware configurations, external conditions and data loads.
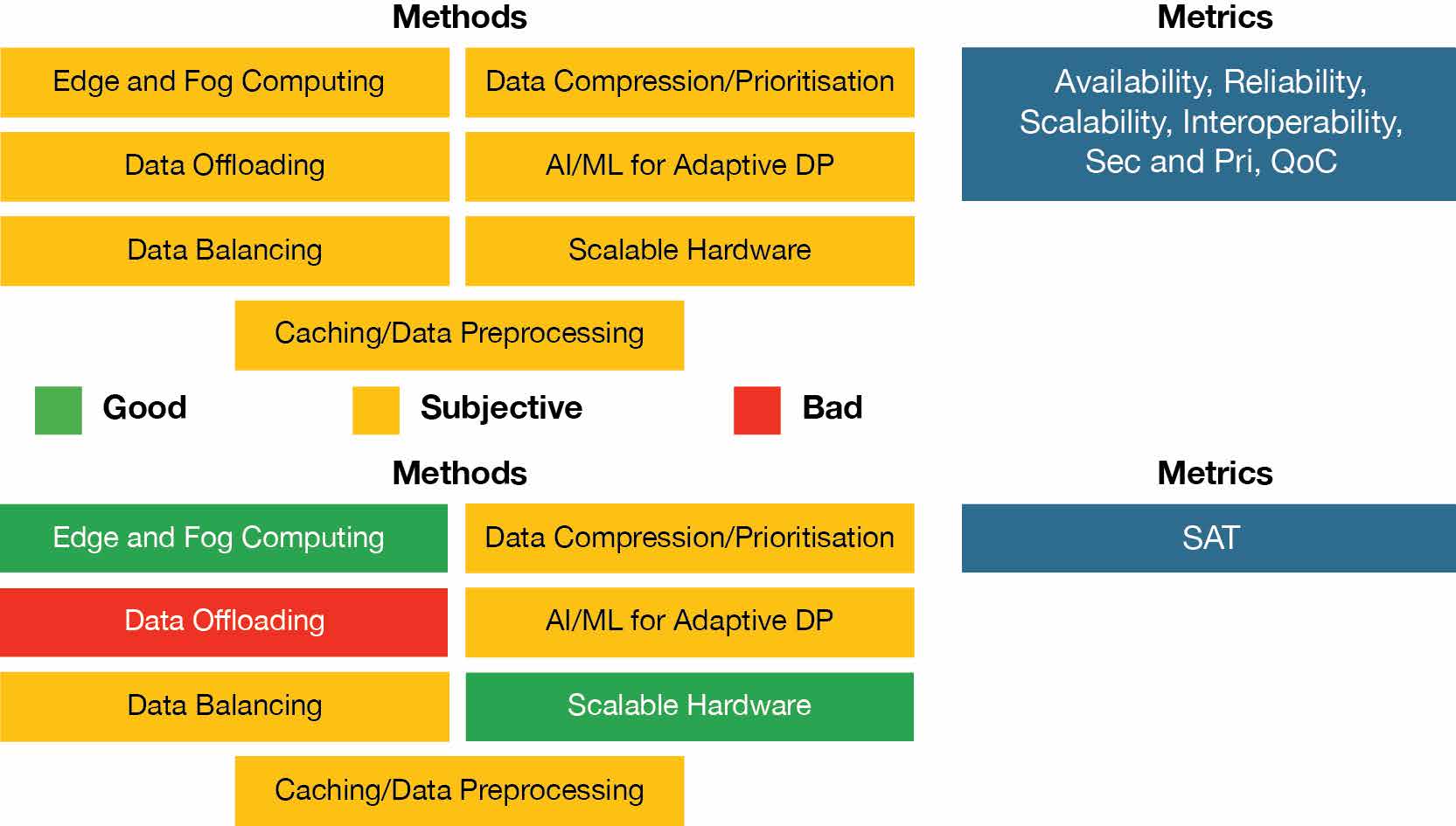
The methods outlined in Figure 3 can be described as follows.
Enhancing QoS Through Edge and Fog Computing
In edge and fog computing, resources are connected through secure links that support data processing at edge servers rather than relying entirely on the cloud. The processing module is thereby more resilient because its dependency on central servers is reduced. Because optimal data distribution is achieved by eliminating any single point of failure, this approach supports the achievement of most QoS metrics.
One vulnerability, however, is that edge and fog systems depend on the proper functioning of both hardware and software within these systems. Any discrepancies can negatively affect QoS. For example, failures in fog nodes can reduce reliability and scalability, while software error—or the introduction of systems with new communication protocols—can compromise interoperability. If some edge nodes become interoperable or break down, the entire QoS can collapse.
To ensure interoperability, NATO’s framework recommends the adoption of common standards across distributed systems.[57] Even when edge nodes belong to different domains or allied forces, they must speak the same language. To this end, the US Joint Interoperability Test Command certifies systems and tools for their compliance with NATO common standards.
Enhancing QoS Through Data Offloading
Data offloading involves transferring processing tasks from the local (edge) system to ground stations or cloud servers. For example, the US project Maven[58] offloads video feeds from ISR assets to ground stations, and this approach has reportedly reduced the real-time latency.
Data offloading is not ideal, however, as remote environments typically introduce significant latency. Further, data offloading is only viable when there is more than one available ground station or cloud system to which the data can be offloaded. Relying on a single high-capacity offload path can create a single point of failure —if that path goes down, the processing cannot be performed at all.
Enhancing QoS Through Data Balancing
By enhancing data balance, the QoS scalability metric of the system will support more RAS in the field. Achieving a perfect balance of data processing, however, requires continuous inter-system monitoring and communication among nodes about their status. The problem is that this requirement can increase service adaptation time as data loads grow. Further, if coordination fails (e.g. if a node silently fails and tasks are not rebalanced because others did not know in time), the data or processing task may become unavailable. This compromises the QoS metrics availability, reliability and scalability. Also, data balancing may become inconsistent with scalability; if every RAS processes data locally, their resources may become unavailable for additional loads.
Data Compression and Prioritisation Techniques
Data compression and prioritisation techniques allow for large amounts of data to be compressed and prioritised for processing. These techniques can help RAS to maintain QoS, particularly in resource-constrained environments. For example, the VAST platform[59] uses these methods to carry high-quality videos from tactical scenarios, which can then be carried by the networks under 50 kilobits per second (very low bandwidth for HD streaming). However, the effectiveness of data compression and prioritisation depends on system interoperability. If compression rules are not standardised across systems—or if priority levels do not align with the operational context—these techniques can fail to function as intended.
AI- and ML-Based Adaptive Data Processing
AI- and ML-based adaptive data processing can dynamically reroute processing tasks and reallocate available resources. This advanced processing capability can assist RAS to achieve QoS metrics, particularly in circumstances with large amounts of image or video processing which are resource intensive.
The reliability of AI-based systems depends on the quality of their training and algorithms. Even scalable hardware architectures, such as GPUs, may struggle with complex algorithms that require simultaneous instructions. Achieving security and privacy metrics when using hardware architectures such as GPUs relies heavily on manufacturer support and deployment processes such as secure key distribution. Meanwhile, QoC is contingent on the quality and context of the data sources.
As can be seen by this overview, it is difficult to single out one method that can consistently preserve all QoS metrics; multiple dynamics are in play. Nevertheless, based on the analysis presented, this article proposes that QoS can be best preserved if processing latency is reduced. This outcome is most effectively achieved through edge and fog computing, where data is processed closer to the RAS, and scalable hardware (such as GPUs) is used to execute instructions more quickly. Despite the conceptual benefits of this proposal, however, selecting the most suitable method will ultimately depend on available resources, budgetary constraints and environmental conditions.
Putting It Together: What Is Needed to Enhance Situational Awareness in Remote Autonomous Systems
A key characteristic of RAS is their need for enhanced situational awareness in order to perceive, infer and act based on the environmental conditions.[60] RAS infer situational awareness from contextual information (or context), representing the relevant environmental data.[61] RAS must dynamically discover relevant contextual information sources that produce quality-compliant context (represented by QoC metrics). Many core capabilities of RAS—including data-acquisition technologies and network and processing functionalities—significantly affect the achievable levels of situational awareness. For example, network and processing resources need to be sufficiently adaptable to transfer varying loads of context and to access them promptly to ensure that the system is sufficiently situationally aware to support real-time operational decision-making.
Existing RAS lack technologies to discover relevant contextual information sources at the standard required to produce quality-compliant contextual information. No single solution can comprehensively achieve scalability while attaining all QoS metrics. Existing solutions typically optimise specific QoS metrics under certain conditions. Attempting to implement a single best solution for scalability presents several challenges. These include limited fit and lack of fail-safety. Limited fit refers to the fact that any single solution may have the capacity to address only a subset of QoS metrics effectively. Lack of fail-safety means that some solutions perform well under ideal conditions but degrade significantly when environmental factors change. Other limitations are also relevant. For example, due to their remote deployment, RAS often face limited network connectivity, and both power and space limitations can constrain onboard processing capacity.
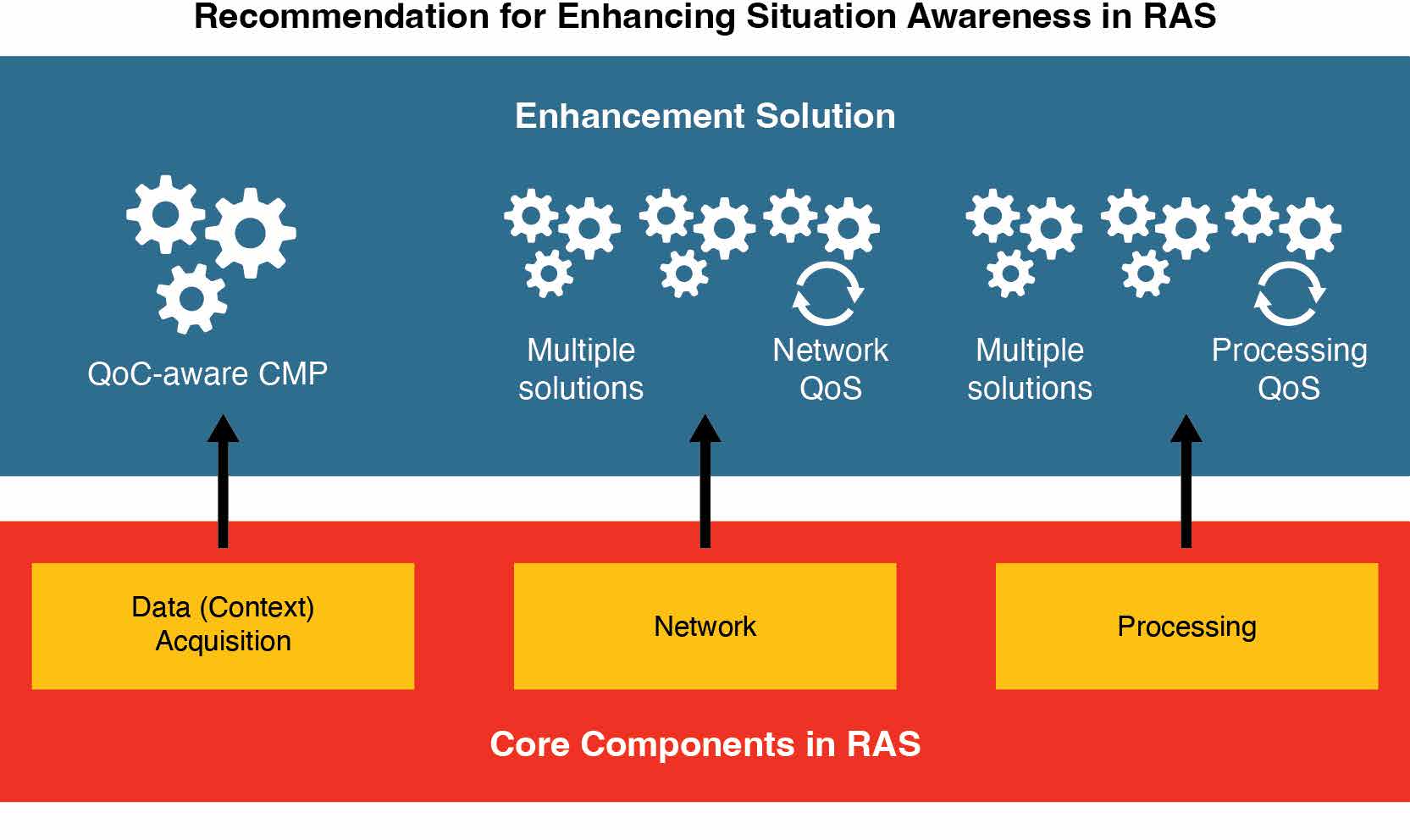
Figure 4 depicts a method to enhance situational awareness in RAS that involves a combination of methods: improved data (context) acquisition, enhanced network performance and increased processing capacity. Improving data acquisition relies on the integration of QoC-aware CMPs, such as CoaaS[62] powered with QoC manager ConCQeng.[63] Such CMPs will enable RAS to discover and acquire relevant and quality-compliant context from diverse sources. During exchange, transfer and processing of various loads of context, the network performance must be optimised to meet the required QoS metrics. In this regard, network switching and relay nodes are an effective way to maintain most QoS metrics. No single solution exists for improving processing capacity across all QoS metrics. Instead, a mix of processing solutions should be adopted that balance the performance, budget, available resources and operational constraints relevant to the circumstances. To minimise service adaptation time, priority should be given to edge- and fog-based solutions and to scalable hardware. To mitigate loss and error rates, we recommend the integration of ML-based methods.
Based on the analysis conducted in this article, Table 3 below indicates how methods can be most effectively prioritised based on whether the use case of RAS has time dominance, has accuracy dominance, or has both.
| Category | Relevant QoS metrics (network and processing) |
Method to prioritise (network and processing enhancements) |
|---|---|---|
| Time dominance (e.g. rapid coordination, swarm control, strike synchronisation) |
Network: delay, jitter, response time Processing: service adaptation time |
Network: relay nodes (e.g. air/vehicular), heterogeneous network switching, scheduling algorithms
Processing: edge and fog computing, scalable hardware (GPU/FPGA) |
| Accuracy dominance (e.g. ISR validation, coalition data fusion, intelligence analysis) |
Network: loss rate, error rate Processing: security and privacy, interoperability |
Network: ML-based prediction and reconstruction Processing: systems and network security measures, CMPs |
|
Has both time and accuracy dominance (e.g. coordinated ISR, decision support and mission autonomy) This category excludes the metrics identified above |
Network: data rate, bandwidth Processing: QoC, scalability, reliability, availability |
Network: network switching, relay nodes Processing: QoC-aware CMP integration, selection of other appropriate method based on time and resource constraints |
To see how the considerations outlined in Table 3 can assist in enhancing the situational awareness of RAS, consider a coordinated ISR mission involving multiple drones deployed across a wide operational area. During target detection and live coordination, they operate under a time-dominant condition. In this phase, it is essential to achieve low delay, to reduce jitter, and to maximise service adaptation time to ensure continuous situational updates. To achieve this, relay nodes and heterogeneous network switching maintain uninterrupted links, while edge/fog processing and GPU acceleration support rapid local processing.
When transmitting collected imagery and other data to remote or coalition command units, the scenario transitions to being accuracy dominant. Now, maintaining low loss and error rates, achieving interoperability and preserving security become critical. In this scenario, ML-based reconstruction restores corrupted or missing packets, maintaining data accuracy during its transfer. Interoperability is enhanced by establishing compatible network links that are managed at the network level, considering all layers of the open systems interconnection (OSI) model. Incorporating CMPs that facilitate consistent and structured data communication ensures that data exchange occurs in standardised formats so that information can be shared seamlessly between heterogeneous systems. Data security is preserved by incorporating common methods such as access control and identity and access management (a detailed discussion of these mechanisms is beyond the scope of this paper).
As operations progress, the mission may evolve into a combined time- and accuracy-dominant phase. In this case, it becomes particularly important to preserve network bandwidth and data rate in order to support timely and accurate response. While these metrics are emphasised here, the other QoS metrics discussed earlier remain applicable (but are not reiterated to avoid repetition). Bandwidth and data rate are enhanced through network switching and the use of relay nodes, ensuring sustained communication performance under varying operational conditions. While processing performance can be preserved through most of the methods discussed above, selecting the optimal method will depend on time constraints, environmental factors, available expertise and resource availability. These will differ depending on the mission context.
By integrating CMPs with complementary network and processing strategies, RAS can achieve enhanced situational awareness and operational scalability. However, to move beyond theory, field exploration and validation trials will be needed. The purpose will be to:
- explicitly test the recommended methods for data acquisition, networking and processing to determine how effectively each approach improves the relevant QoC or QoS metrics based on the mission use case
- develop and incorporate methods to improve situational awareness in RAS through coordinated enhancement across data-acquisition, network and processing layers
- establish evaluation frameworks that measure performance under varied operational conditions (e.g. bandwidth constraints, latency fluctuations and environmental interference) to inform robust defence-grade deployments.
Conclusion
Australia’s defence strategy emphasises the use of autonomous systems to attain a strategic advantage in complex and high-risk operational environments. The ADF, and the Australian Army in particular, is committed to incorporating RAS into its capabilities to more effectively achieve mission objectives.[64] Able to execute missions when the deployment of soldiers is impractical or dangerous, RAS can perceive, interpret and autonomously adapt to mission conditions, making them invaluable assets in modern military operations. However, their utility depends on their capacity to achieve high levels of situational awareness, a characteristic which depends heavily on technologies that support data acquisition, network connectivity and information processing. Limitations in data discovery methods, the impact of remote operations on network performance, and constraints in computational power hinder the effectiveness of these systems.
In response to these limitations, this article has presented the key challenges affecting situational awareness in RAS, explored potential technological solutions and provided recommendations to enable the effective deployment of RAS by the ADF in support of Australia’s defence strategy. Collectively, the recommendations made and the pathways proposed in this article provide a strategic roadmap for the ADF to transition a concept for enhancing situational awareness in RAS into operational practice. Systematically testing and integrating the proposed methods across all system layers will enable future RAS deployments to achieve seamless, scalable situational awareness and greater mission readiness in dynamic and resource-constrained environments.
Acknowledgements
This paper draws on material covered in John Blaxland, The Australian Army from Whitlam to Howard (CUP, 2014). The author wishes to acknowledge the constructive feedback from the blind reviewers. Readers interested in exploring this issue further should also examine the contributions by a range of authors in Russell Glenn (ed.) Trust and Leadership: The Australian Army Approach to Mission Command (University of North Georgia Press, 2020). This includes contributions by Russell Glenn (mission command overview), Peter Pedersen (AIF), Peter Dean (Pacific War), Meghan Fitzpatrick (Korean War), Bob Hall (Vietnam War), John Caligari (1 RAR Group in Somalia), John Blaxland (East Timor in 1999), John Frewen (Solomon Islands in 2003), Ian Langford (Special Forces) and Chris Field (Queensland national emergency in 2010–11). See also Russell Glenn, ‘Mission Command in the Australian Army: A Contrast in Detail’, Parameters: The US Army War College Quarterly 47, no. 1 (2017), DOI:10.55540/0031-1723.2833.
Endnotes
[1] Robotics and Autonomous Systems Implementation and Coordination Office, Robotic & Autonomous Systems Strategy v2.0 (Commonwealth of Australia, 2022).
[2] MR Endsley, ‘Toward a Theory of Situation Awareness in Dynamic Systems’, Human Factors: The Journal of the Human Factors and Ergonomics Society 37, no.1 (1995).
[3] Ibid.
[4] U.S. Army, The U.S. Army Robotic and Autonomous Systems Strategy (2017).
[5] Benjamin Scott and André Michell, ‘Enhancing Situational Understanding through Integration of Artificial Intelligence in Tactical Headquarters’, Military Review (November–December 2022).
[6] Tobias Vestner and Arthur Lusenti, ‘Great Powers’ Military Robotics’, Stratos 1, no. 23 (2023).
[7] Samuel Bendett et al., Advanced Military Technology in Russia (Chatham House, 2021).
[8] Craig Lippett, ‘Drone Warfare: How Autonomous Technologies Fuel Defence Operations’, Karve (website), 10 October 2023.
[9] ‘Waymo Driver’, Waymo (website).
[10] NASA Science Editorial Team, ‘What We’re Learning About Ingenuity’s Flight Control and Aerodynamic Performance’, NASA (website), 20 April 2021.
[11] Industrial Mobile Robotics: Revolutionizing the Factory of the Future (Analog Devices, n.d.).
[12] ‘Remote operation of vehicles with 5G’, Ericsson (website).
[13] Eric Crawley et al., ‘A Framework for QoS-based Routing in the Internet (No. rfc2386)’.
[14] Timothy Chung and Roshan Daniel, ‘DARPA OFFSET: A Vision for Advanced Swarm Systems through Agile Technology Development and Experimentation’, Field Robotics 3 (2023), 97–124.
[15] Charith Perera et al., ‘Context Aware Computing for the Internet of Things: A Survey’, IEEE Communications Surveys & Tutorials 16 (2013).
[16] Xin Li et al., ‘Context Aware Middleware Architectures: Survey and Challenges’, Sensors 15 (2015).
[17] Abdur Forkan et al., ‘BDCaM: Big Data for Context-Aware Monitoring—A Personalized Knowledge Discovery Framework for Assisted Healthcare’, IEEE Transactions on Cloud Computing 5, no. 4 (2015).
[18] Abdur Forkan et al., ‘CoCaMAAL: A Cloud-Oriented Context-Aware Middleware in Ambient Assisted Living’, Future Generation Computer Systems 35 (2014).
[19] Alireza Hassani et al., ‘Context-as-a-Service Platform: Exchange and Share Context in an IoT Ecosystem’, in L Bedogni and F Restuccia (eds), 2018 IEEE International Conference on Pervasive Computing and Communications Workshops (IQ2S’18): 9th International Workshop on Information Quality and Quality of Service for Pervasive Computing (PerCom Workshops) (IEEE, 2018).
[20] Martin Bauer, ‘FIWARE: Standard-Based Open Source Components for Cross-Domain IoT Platforms’, in 2022 IEEE 8th World Forum on Internet of Things (WF-IoT) (2022).
[21] Shakthi Weerasinghe et al., ‘Towards World Wide Context Management: Architecting Distributed Contextual Intelligence Systems for Real-Time IoT Applications’, in 2023 24th IEEE International Conference on Mobile Data Management (MDM), Singapore (Singapore, 2023).
[22] Sharnil Pandya et al., ‘Examination of the Fifth-Generation Vehicular Simultaneous Wireless Information and Power Transfer Cooperative Non-Orthogonal Multiple Access Network in Military Scenarios Considering Time-Varying and Imperfect Channel State Information Conditions’, The Journal of Defense Modeling and Simulation: Applications, Methodology, Technology 19, no. 4 (2022).
[23] Daniel Kent, Philip K McKinley and Hayder Radha, ‘Localization Uncertainty-Driven Adaptive Framework for Controlling Ground Vehicle Robots’, Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Las Vegas, Nevada, October 2020 (IEEE, 2020).
[24] Haozhe Li et al., ‘Joint Optimization on Trajectory and Resource for Freshness Sensitive UAV-Assisted MEC System’, IEEE Transactions on Vehicular Technology 73, no. 3 (2023).
[25] RA Raji et al., ‘Advanced Mission Management System for Unmanned Aerial Vehicles’, Defence Science Journal 64, no. 5 (2014).
[26] Shuxiao Chen et al., ‘Real-Time Geo-Localization Using Satellite Imagery and Topography for Unmanned Aerial Vehicles’, 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (2021).
[27] Xueqi Ren et al., ‘Joint Location, Bandwidth and Computation Offloading for Thz-Enabled Hierarchical Multicoalition UAV MEC Networks’, 2023 IEEE 11th International Conference on Information, Communication and Networks (ICICN) (2023).
[28] ‘Yonca Bayrakdar et al., ‘Routing Protocol for AUV Communications: Report from Field Tests’, OCEANS 2017, Aberdeen (IEEE, 2017).
[29] ‘ANAFI Ai Connectivity’, Parrot (website).
[30] MD Moniruzzaman et al., ‘Long Future Frame Prediction Using Optical Flow-Informed Deep Neural Networks for Enhancement of Robotic Teleoperation in High Latency Environments’, Journal of Field Robotics 40 (2023).
[31] ‘‘Reaper MQ-9A’, Royal Air Force (website)..
[32] ‘Advanced Battle Management System: Victory Through Distributed Connectivity’, Air Force Materiel Command (website), 27 March 2025.
[33] Ki Lee, Greg Dupier and John Pisano, ‘How the U.S. Military Is Using Edge Computing’, Booz Allen (website).
[34] ‘Air Force Distributed Common Ground System’, Air Force (website).
[35] John Higgins, ‘TITAN Brings Together Systems For Next Generation Intelligence Capabilities’, Defense Visual Information Distribution Service (website), 25 August 2012.
[36] Georgy Skorobogatov, Cristina Barrado and Esther Salamí, ‘Multiple UAV Systems: A Survey’, Unmanned Systems 8, no. 2 (2020).
[37] Jen Judson, ‘US Army to Demo Offensive Drone Swarms in Next Project Convergence’, Defense News, 2 March 2022.
[38] ‘Army Advances Learning Capabilities of Drone Swarms’, U.S. Army (website), 10 August 2020.
[39] ‘RQ-4 Global Hawk’, U.S. Air Force (website).
[40] Sean Cunningham, ‘UAVs in the Military’, in Electrical and Computer Engineering Design Handbook: An Introduction to Electrical and Computer Engineering and Project Design by Tufts ECE Students (Tufts University, 2026).
[41] Jackson Gray, ‘Project Convergence Capstone 4 Works to Integrate Joint, Multinational Defense Systems’, U.S. Army (website), 27 February 2024.
[42] ‘Maven Smart System’, Missile Defense Advocacy Alliance (website).
[43] ‘RQ-4 Global Hawk’, U.S. Air Force (website).
[44] Li et al., ‘Context Aware Middleware Architectures’.
[45] Kanaka Sai Jagarlamudi et al., ‘Requirements, Limitations and Recommendations for Enabling End-to-End Quality of Context-Awareness in IoT Middleware’, Sensors 22, no. 4 (2022).
[46] Hassani et al., ‘Context-as-a-Service Platform’.
[47] Ibid.
[48] Kanaka Sai Jagarlamudi et al., ‘Validating Quality of Context in Pervasive Computing Systems: Surf Life Saving Use Case’, 2023 IEEE International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events (PerCom Workshops) (IEEE, 2023).
[49] Alireza Hassani et al., ‘Context Definition and Query Language: Conceptual Specification, Implementation, and Evaluation’, Sensors 19, no. 6 (2019).
[50] Kanaka Sai Jagarlamudi et al., ‘Validating Quality of Context in Pervasive Computing Systems: Surf Life Saving Use Case’, 2023 IEEE International Conference on Pervasive Computing and Communications Workshops and Other Affiliated Events (PerCom Workshops) (IEEE, 2023).
[51] Ibid.
[52] Eric Crawley et al., ‘A Framework for QoS-based Routing in the Internet (No. rfc2386)’.
[53] Give Your Jet the X Factor’, Honeywell (website).
[54] ‘Battlefield Airborne Communications Node (BACN)’, Northrop Grumman (website).
[55] P Zablocky and G Bertoli, ‘Army Tactical Network Quality of Service and Graceful Degradation Concept’, The Cyber Defense Review, 15 November 2016.
[56] Jagarlamudi et al., ‘Requirements, Limitations and Recommendations for Enabling End-to-End Quality of Context-Awareness in IoT Middleware’.
[57] ‘Military Data Interoperability and Exchange Systems’, Defense Advancement (website).
[58] Richard H Shultz and Richard D Clarke, ‘Big Data at War: Special Operations Forces, Project Maven, and Twenty-First-Century Warfare’, Modern War Institute at West Point (website), 25 August 2020.
[59] ‘Viasat And Reticulate Micro to Collaborate on Satellite Video Compression Technology’, Reticulate Micro (website), 18 September 2024.
[60] Endsley, ‘Toward a Theory of Situation Awareness in Dynamic Systems’.
[61] Anind K Dey, ‘Understanding and Using Context’, Personal and Ubiquitous Computing 5 (2001).
[62] Hassani et al., ‘Context-as-a-Service Platform: Exchange and Share Context in an IoT Ecosystem’.
[63] Jagarlamudi et al., ‘Validating Quality of Context in Pervasive Computing Systems’.